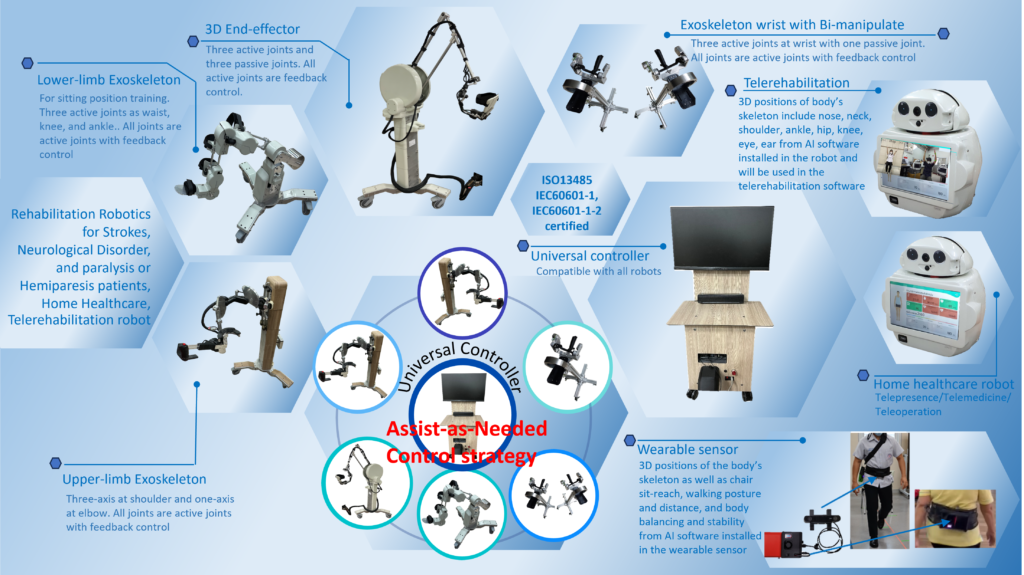
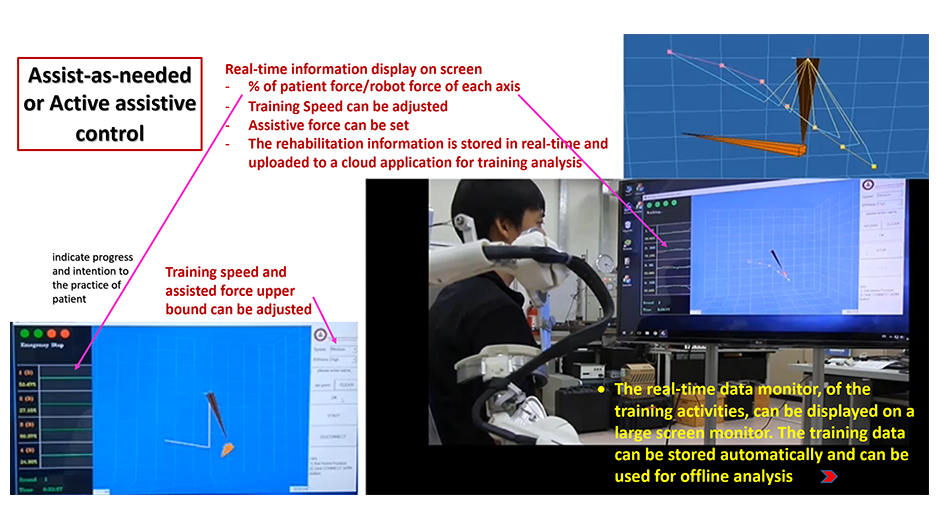
ระบบควบคุมการทำงานของหุ่นยนต์เป็นระบบที่เราพัฒนาขึ้นเอง และมีการทำงานในลักษณะ Assist as needed หมายความว่าหุ่นยนต์จะช่วยในการเคลื่อนที่ให้ก็ผู้ฝึกเท่าที่จำเป็น เป็นการผสมผสานกันระหว่างการควบคุมแรงและการควบคุมการเคลื่อนที่ ทำให้ผู้ฝึกมีความรู้สึกเหมือนกันเคลื่อนที่ผู้ตัวเอง ทำให้มีความมั่นใจในการเคลื่อนที่ นอกจากนั้นยังมีการฝึกด้วยเกมร่วมกับการฟื้นฟูสมรรถภาพเป็นแนวทางการฟื้นฟูสมรรถภาพที่แพร่หลายในปัจจุบัน ระบบเกมคอมพิวเตอร์ประกอบการฟื้นฟูสามารถนำเสนอเกมเพื่อกระตุ้นและจูงใจผู้ป่วยให้รับบริการในสภาพแวดล้อมที่ไม่เพิ่มความเครียด พร้อมกับเป็นการลดความเบื่อหน่ายจากการฝึกนั้น จึงจำเป็นต้องหากิจกรรมทำให้ผู้เล่นรู้สึกว่าได้ทำสิ่งใหม่ ๆ อยู่ตลอดเวลา ดังนั้นการนำเกมเข้ามาช่วยสร้างแรงจูงใจในการฝึกจึงกลายเป็นสิ่งที่สำคัญ ซึ่งระบบเกมที่ถูกออกแบบอย่างเหมาะสม จะช่วยลดความเบื่อหน่ายและสร้างแรงจูงใจให้ผู้ป่วยอยากฝึก ทำให้ผู้ป่วยสนุกกับการฟื้นฟู และเกิดความต้องการในการใช้อุปกรณ์อย่างต่อเนื่อง ทำให้สามารถใช้งานระบบได้นานขึ้น ช่วยให้การฟื้นฟูมีประสิทธิภาพมากขึ้น
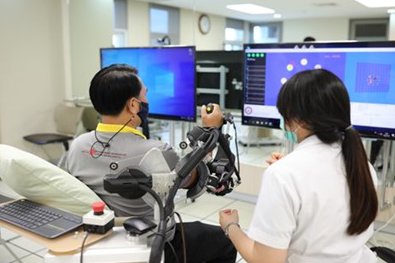
หุ่นยนต์สามารถเก็บข้อมูลผ่านระบบ cloud เพื่อให้แพทย์ และผู้ฝึกสามารถติดตามผลการฝึก และความก้าวหน้าของการฟื้นฟูได้อย่างเรียลไทม์ และต่อเนื่อง หุ่นยนต์ทุกตัวที่ติดตั้งใช้งานอยู่ตามศูนย์ต่าง ๆ สามารถเชื่อมต่อเข้ากับระบบเครือข่ายทั้งเครือข่ายคอมพิวเตอร์ของโรงพยาบาลหรือเครือข่ายผ่านระบบ 4G/5G (ในกรณีหลังนี้ต้องมีค่าใช้จ่ายในการเชื่อมต่อ) ทำให้ข้อมูลการฝึกปฏิบัติที่หุ่นยนต์ทุกตัวสามารถบันทึกขึ้นระบบ cloud เพื่อให้ในการวิเคราะห์และประเมินผลต่อไป