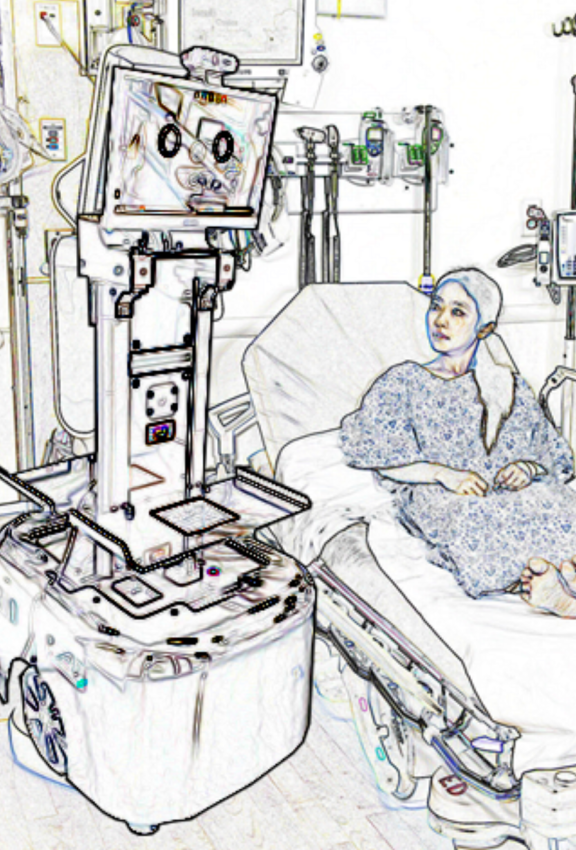
Telemedicine / Telepresence
แพทย์สามารถดูแลผู้ป่วยได้โดยไม่จำเป็นต้องอยู่ต่อหน้ากัน โดยเชื่อมโยงสื่อระหว่างบุคลากรทางการแพทย์และผู้ป่วยผ่านระบบ telepresence
Teleoperation
ระบบ Teleoperation ควบคุมการเคลื่อนที่จากระยะไกลผ่านระบบเครือข่าย 4G/5G
Vision System and Collision Avoidance of Obstacle
ระบบหลบสิ่งกีดขวางอัตโนมัติ

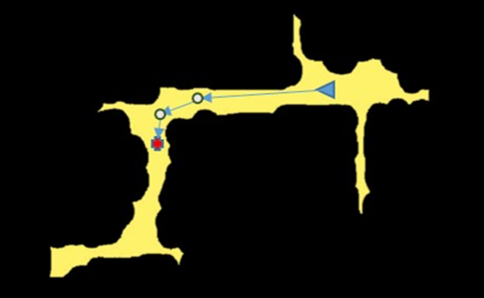
Autonomous Mapping
ระบบการทำแผนที่ และ หาเส้นทางเดินแบบอัตโนมัติด้วย SLAM (Simultaneous localization and mapping) และ Odometry
Autonomous Navigation
ระบบการเคลื่อนที่อัตโนมัติ
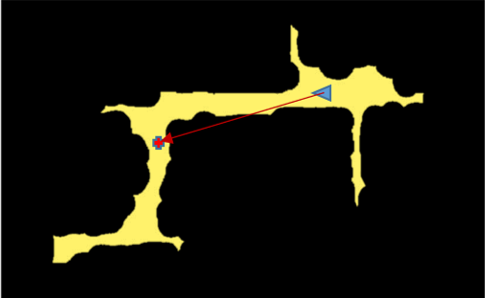
Autonomous Path Planning
การหาเส้นทางเดินอัตโนมัติจากตำแหน่งที่กำหนดขึ้น
Autonomous Docking Station
ระบบชาร์ตอัตโนมัติ